Categories: Geek, Embedded
 Lego Robots
Lego Robots
Take a look at a few images and movies of our Lego Robot, Grimace. Its a simple differential drive robot with light sensors and bumpers.
Enter the Gallery to take a look at its construction, and clips of Grimace in action as he tries to find light while avoiding obstacles ![]()


Mobile Robotics - Path Planning
Continuing on, on my Mobile Robotics assignment, in the current lab we use simple path planning techniques to get from point A to point B.
Using a map built by exploring a world (as mentioned in the previous article) the code plans a path (not necessarily optimal) from the starting position to the goal position.
The "wavefront" path planning algorithm is simple, but quite effective. It is able to find a path through free space, avoiding obstacles and all locations not explored as yet.
Notice how the path planned "hugs" the wall. This is a consequence of the simplicity of the path planning algorithm and will cause undesired (duh!) collision with obstacles. We can however get over this problem very easily by "growing" the obstacles by the size of the robot.
In the following images, the obstacles are "grown" by a few cells (the areas marked in light pink) before planning is done. This guarantees a safe path that the robot can take.
Mobile Robotics - Simple Mapping
In one of my courses, "Mobile Robotics," we're supposed to program "lego robots" that have various sensors (light, sonar etc) to do funky stuff. First however, we simulate our robots using the PlayerStage environment.
In one of my recent labs, I had to build a map of the robot's world using only its laser sensors to detect obstacles. The laser sensors typically have a span of 90 degrees, with a laser ray emitted at every degree. By measuring the time taken for the ray to hit an obstacle and return, the distance to the obstacle can be measured. Of course, the robot is constantly moving, and the laser sensors aren't perfect, so they don't always return the most accurate readings!
Take a look at the world I used. The robot's starting orientation is arbitrary (in this case it starts off at the bottom left corner at an angle to the horizontal).
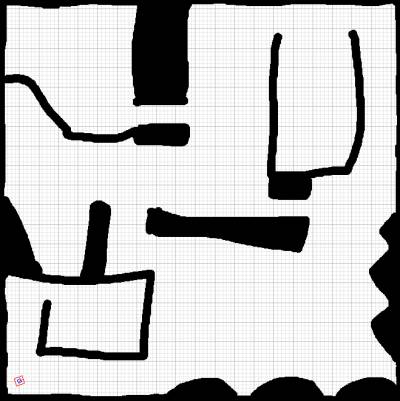
The robot is programmed to move to a goal position, avoiding obstacles using the "force potential" method. A resultant vector (direction) is calculated by considering all obstacles in the robot's immediate vicinity as exerting repulsive forces, and the goal position as exerting a strong attractive force.
The software maintains an internal representation of the world using a large 2 dimensional array. Each cell represents a 10cm x 10cm grid position in the world. Cells that are occupied are coloured black, empty cells white, and cells that have not yet been explored are marked grey.
The goal is to map as much of the world as possible in the shortest time. In addition, I didn't want to complicate matters and decided against using any path planning algorithms.
The problem is challenging, and my solution isn't optimal, however it does produces reasonable results. When the robot's laser sensors detect an obstacle, the corresponding cell in the internal map representation is marked as occupied. In addition, all cells in the line segment connecting the robot to the obstacle are marked as unoccupied.
That works well, but we want the robot to explore areas that it hasn't visited yet! The world occupies just 1/9ths of the robot's internal map representation. Can we just pick a random unexplored area in the world and move toward it? Of course there might be a number of obstacles preventing that. We might be able to break down the problem into a number of sub-goals designed to avoid obstacles directly in the path of the robot's path. Or, the unexplored area might be in a boxed enclosure. When do we decide to give up on the goal?
My algorithm instead explores an area in the immediate vicinity of the robot (for example a rectangular area, centered on the robot). It picks a random position in this area that has not been visited, and checks to see if there is a straight line path to it without any obstacles in the robot's way. If so, the robot moves toward that goal exploring areas around the goal.
I omit the implementation details (force potential method, detecting obstacles in a straight line path) for brevity's sake, besides it isn't too hard anyway. This method actually turns out to be pretty effective. It explores a fair amount of the world in reasonable time, is able to navigate through narrow pathways and squeeze itself through tiny openings!
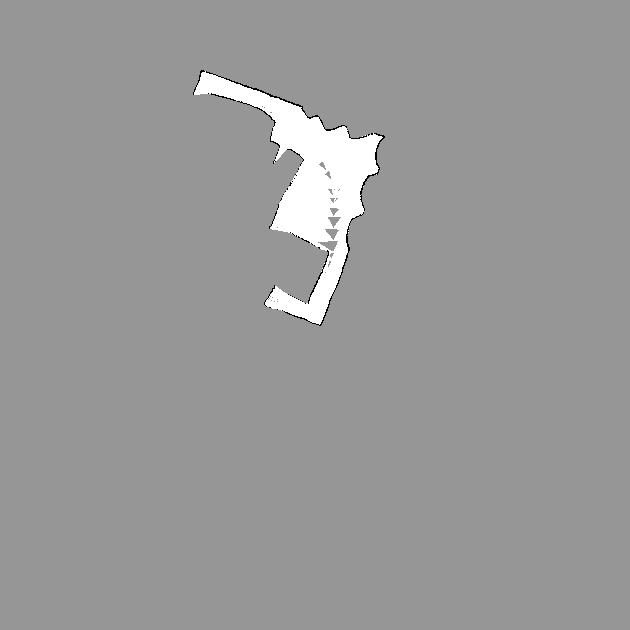
Take a look at the map of the world generated after 5 minutes of running time...
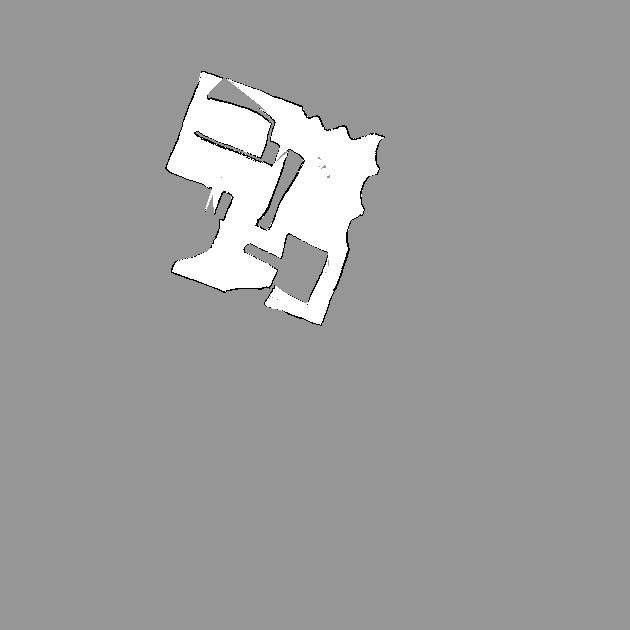
... and 20 minutes...
Anyone have better (and simple) ideas?
uClinux porting HOWTO
uClinux is a popular port of the Linux operating system to processors without a MMU (Memory Management Unit). Kernel versions 2.0.x, 2.4.x, and 2.6.x are supported to varying degrees on numerous architectures.
The uClinux distribution contains the following main components: the uClinux kernel, various libraries and numerous linux utilities. In this article some of the tasks that need to be done to port the uClinux kernel to a new architecture are examined. The information is specific to the 2.4.x uClinux kernel and the Samsung S3C44B0X, a 32-bit processor with an ARM7TDMI core.
The latest uClinux distribution uClinux-dist-20040408, can be downloaded from here. The ELF ARM7 toolchain for uClinux can be downloaded from here.
Three are three main levels where porting is required. In the case where the processor core is not supported, a new architecture will have to be added in uclinux/linux-2.4.x/arch/. In our case, support for the ARM7TDMI architecture is already present in uclinux/linux-2.4.x/arch/armnommu/ considerably reducing the effort required to port uClinux to the s3c44b0x processor. At the second level, support for the particular processor (machine) is to be added using processor specific knowledge such as registers etc. Finally, support for the board containing the processor and peripherals need to be added. This will include adding support for devices on the board that are not yet supported by linux, or configuring existing device drivers.
Jump to page: 1 2 3 4 5 6
Application debugging on ARM7TDMI embedded systems
This article describes the steps to be followed to debug applications on embedded ARM7TDMI processors using the GNU Debugger 'GDB' and gdbserver.
Embedded systems typically have memory constraints that restrict the size of executables (with debug information) and debuggers stored in ram. A stripped executable binary of much smaller size is usually placed on the target board, while the executable with debugging information remains on the host development system. Similarly since GDB is a large and sophisticated debugger, a light-weight control program gdbserver was created to be run on the target system.
gdbserver is executed along with the stripped application on the target machine. GDB is loaded on the host system along with the unstripped application, containing debug symbols. GDB communicates with gdbserver via a serial port or TCP/IP to provide a full-fledged debugging environment. In this article a GUI front-end debugger, Data Display Debugger 'DDD' is used.
Of JVMs and other software for ARM Linux
Random notes on the installation of Wonka, Kaffe, PCSC-lite, and Java Native Interface on ARM linux systems.
Wonka-0.9.6 2207 Kb
Wonka binary1042 Kb
Wre.jar (reduced packages, 1209 Kb uncompressed)
Mounting windows shares from Linux
Here's a quick shell script I wrote to mount windows shares from Linux. It may be called with the arguments 'mount' or 'umount' to respectively mount and unmount the windows shares.
if [ $# -le "0" ]; then
echo "Usage: mwfs [mount | umount]"
exit 0
fi
case "$1" in
[mM][oO][uU][nN][tT] ) echo "Mounting wfs..."
echo "Please enter password for acmeuser"
stty -echo
read PASS
stty echo
echo "Mounting //acme/users..."
smbmount //acme/users /home/acmeuser/wfs/users -o username=acmeuser,workgroup=acmeindia,password=$PASS
;;
[uU][mM][oO][uU][nN][tT] ) echo "Unmounting wfs..."
echo "Unmounting //acme/users..."
umount /home/acmeuser/wfs/users/
;;
* )
echo "Invalid parameter"
esac
exit 0
Kermit download software for Linux Systems
During uClinux development, one of the most useful tools is a kermit download utility. Most bootloaders support download of binary images on to their targets via the Kermit protocol on a serial line. In windows the program Hyperterminal may be used to send the file from a host. For unix systems Columbia University released a free program, G-Kermit CU, which can be called by Minicom to perform a kermit transfer.
The following patch allows G-Kermit CU to function as a standalone program, eliminating the need of a terminal program such as Minicom.
Adding a new kernel module into the uClinux distribution
This article details the steps that need to be followed to add a kernel module to the uClinux build process.
Adding user applications into the uClinux distribution
This article details the steps that need to be followed to add a user application to the uClinux build process. Upon building the uClinux distribution, the executable is created and copied to the romfs directory which is included with the final image. After the target board boots up, the binary may be executed from the rom filesystem.
 About the Author:
About the Author:
 Categories:
Categories:
 Recent Entries:
Recent Entries: Archives:
Archives: Feeds:
Feeds: Photos:
Photos: